| Продолжение. Предыдущая - пятая часть здесь. Шестое занятие нашей небольшой группы обещало быть очень интересным - помимо интересной темы "Ветвления в программах" мною были заготовлены интересные задания. |  |

четверг, 29 ноября 2012 г.
Кружок по робототехнике. Занятие шестое
среда, 28 ноября 2012 г.
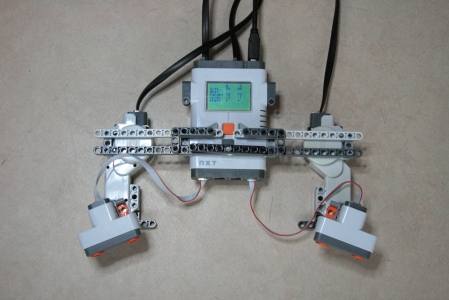
Определение положения предмета с помощью датчиков расстояния
 | Понятие триангуляция знакомо многим, кто хоть раз разбирался как работают GPS приемники или тем, кто изучал что такое радиопеленгация. На самом деле это понятие пришло из геометрии и геодезии. Но сейчас пойдет речь именно о триангуляции, как способе определения координат или местоположении предмета. |
В качестве экспериментальной установки он использовал следующую конструкцию:
вторник, 27 ноября 2012 г.
Стильные штучки: LEGO граммофон
| Известная по многим своим LEGO-изобретениям Anika Vuurzoon представила на суд общественности свою новую работу: LEGO граммофон. Это музыкальное устройство выполнено вполне в духе предыдущих изобретений - стильно и функционально. |  |
По своей сути, данный механизм работает так же как NXT секвенсор, о котором уже упоминалось в блоге: в зависимости от показаний на датчике цвета, NXT блок выводит разные ноты. Только в данном случае логика работы несколько усложнена, чтобы расширить диапазон распознаваемых нот - каждая нота кодируется не одним, а двумя цветами.
Кстати, довольно большую часть в этом проекте составляет специальная программа созданная Matthias Paul Scholz, которая преобразует любую музыкальную композицию в соответствующий цветовой круг.
Новинки отечественного видео-блогинга
| Старый знакомый - видео-блогер darkavengersmr поделился очередной радостью - вместе со своими детьми он собрал робота играющего крестики-нолики и победил все ошибки в оригинальной программе |  |
На самом деле на его блоге можно найти еще довольно свежие, крайне интересные материалы
воскресенье, 25 ноября 2012 г.
NXT и Python: мотор застрял?
 | Предыдущие статьи по программированию NXT роботов на языке Python можно считать вводными - они вкратце знакомили с базовыми API, применив которые можно было уже написать простые программы. |
Если попробовать запустить робота с небольшими (меньше 50 процентов) параметрами мощности с помощью функции
run() - такое, к примеру, возможно при движении тележки вдоль черной линии по PID регулятору, то соответствующий мотор может вообще не начать вращаться. Причем, при этом сам мотор может выдавать высокочастотный писк.Алгоритмы: черно-белое движение. Часть II с половиной
| В части II цикла обзора алгоритмов движения вдоль линии, траектория движения робота представляла из себя своеобразный зигзаг. Причем, если посмотреть на работу каждого колеса в замедленной съемке, то окажется, что существуют такие моменты времени, когда колесо крутиться назад (особенно это видно на больших колесах), хотя в программе никакого движения назад нет. |  |

Т.е. здесь четко видно общая тенденция движения вперед, но периодически колесо откатывается назад, во время выполнения остановки.
пятница, 23 ноября 2012 г.
Учимся у победителей!
 | Сразу после робототехнического фестиваля "РОБОФЕСТ", проходивший этой весной, организационный комитет всероссйиского этапа WRO объявил об очень интересной инициативе - они начали собирать фото- и видео- материалы роботов, которые участвовали в отборочных состязаниях WRO в России. |
Хотя все материалы были собраны еще летом, но по очевидным причинам они не выкладывались в свободный доступ - иначе конкуренты из других стран могли бы ознакомиться с удачными конструкциями еще до основного этапа WRO и использовать какие-то элементы в своих роботах.
Новая победа блога NiNoXT
| Практически в течение всей осени работало жюри конкурса сайтов "Позитивный контент", и вот в ноябре были объявлены победители... |
- найти наиболее качественные, познавательные, образовательные и безопасные сайты;
- поддержать позитивные сайты, вовлекающие детскую и молодежную аудиторию Рунета в активную жизнь в Сети и за ее пределами.
среда, 21 ноября 2012 г.
Алгоритмы: черно-белое движение. Часть VIII
 | Как и обещано ранее, настало время рассмотреть от чего же еще зависит коэффициент пропорциональности линейного регулятора при движении вдоль линии. В предыдущих заметках было выведено, что он однозначно зависит от освещенности трассы и яркости элементов на ней: |

суббота, 17 ноября 2012 г.
Россия выиграла право провести WRO в 2014 году
| Еще одна радостная новость для юных (и не очень) робототехников была привезена из Малайзии - Россия выиграла право провести Международную Робототехническую Олимпиаду в 2014. |
Для российских команд это своего рода вызов - нужно начинать усиленно готовиться уже сейчас - проиграть хотя и довольно сильным противникам мы на своей территории просто не имеем права.
Спасибо Сергею Косаченко за эту информацию.
Ссылка на источник новости.
Видео и фотографии с WRO 2012
| Новосибирский проект "Лига Роботов" выложил в сеть фото- и видео-материалы собранные в ходе поездки на Международную Робототехническую Олимпиаду в Малайзии. |

пятница, 16 ноября 2012 г.
Кружок по робототехнике. Занятие пятое
| Продолжение. Предыдущая часть здесь. Пятое занятие кружка по робототехнике прошло в полном составе группы - в этот раз были все пять школьников. Занятие прошло чуть-чуть быстрее того, как было запланировано: | |
- Сначала продолжили знакомство с датчиком расстояния и выполнили несколько интересных заданий, включая автоматическую парковку робота между двух препятствий.
- Затем переключились на датчик цвета, с которым поработали в двух режимах - определения цвета и замера освещенности. Здесь ребята задавали направление движения робота с помощью цветных карточек, после чего научились реагировать на поверхности, по разному отражающих свет, что ближе к концу занятия привело к тому, что каждая тележка в итоге проехалась по черной линии под управлением простейшего релейного регулятора.
четверг, 15 ноября 2012 г.
Робо-фестиваль в Коврове. Как это было...
| Как многие помнят по предыдущим записям на блоге, 12-14 ноября 2012 в г. Ковров Владимироской области международный проходил робототехнический фестиваль RoboTechKovrov - 2012. |
Помимо хозяев-ковровцев и нижегородцев в фестивале еще принимали участие команды из г. Магадан, а также из Белоруссии. К сожалению, команды из других городов не смогли приехать, скорее всего от того, что в это же самое время проходили другие мероприятия: WRO в Куала-Лумпур и фестиваль технического творчества "Информатика и робототехника" в Санкт-Петербурге.
В целом мероприятие прошло на очень хорошем уровне - здесь нужно сказать огромное спасибо организаторам: Ковровской государственная технологическая академия имени В.А.Дегтярева, а именно Дмитрию Викторовичу Багаеву и профкому академии. Гостей фестиваля не только душевно встречали и провожали, а также хорошо кормили и водили на интересные экскурсии.
Наконец-то победа! И сразу Золото!
| Конец прошлой недели ознаменовался прекрасной новостью - российские школьники стали призерами на Всемирной Робототехнической Олимпиаде (World Robot Olympiad ), которая проходила 9-11 июля в Куала-Лумпур (Малайзия). |
суббота, 10 ноября 2012 г.
Книга "Creating Cool MINDSTORMS NXT Robots"
 | Пользователь TarTar на Российском Фан Форуме LEGO недавно поделился радостью, что приобрел книжку "Creating Cool MINDSTORMS NXT Robots" известного LEGO Mindstorms гуру Daniele Benedettelli. В этой книжке автор делиться своим многолетним опытом проектирования и программирования LEGO роботов и в том числе приводит инструкции для сборки для многих своих LEGO изобретений. |
 |  |  |
 |  |  |
LEGO WeDo - робототехника с самого детства
| В линейке робототехнических образовательных LEGO наборов есть набор LEGO WeDo. Он основывается на LEGO System и PF-моторах, в отличие от LEGO Mindstorms, который основывается на элементной базе Technic. Основная аудитория для LEGO WeDo - дошкольники и школьники младших классов. Отчасти еще и из-за этого элементная база сильно упрощена. |  |

четверг, 8 ноября 2012 г.
Установка nxt-python модуля под Windows
| Не смотря на то, что на блоге было опубликовано уже много статей посвященных программированию LEGO роботов на языке Python,еще не было заметки, которая бы помогала настроить среду программирования на операционной системе Windows (хотя под Linux уже было одна). |
Будем подразумевать, что сам язык программирования уже установлен на компьютере и следующий шаг установить все остальное программное обеспечение, необходимые для работы с NXT блоком. Единственное, что хочется добавить, что поскольку другие модули python, которые понадобятся для аспектов программирования роботов, поставляются только для 32битной ОС, то и python придется поставить в его 32битной версии.
Все начнется с установки модуля nxt-python, который можно скачать здесь. Скачав ZIP архив, необходимо распаковать его в удобное место, желательно, чтобы путь при этом получился не очень длинный, поскольку потом его придется вбивать руками в командной строке. Затем, запустите командный интерпретатор
cmd.среда, 7 ноября 2012 г.
NXT2WIFI - первый шаг LEGO робота в Скайнет
| Помните в фильме Терминатор, суперкомпьютеры Скайнет, объединенные в сеть, обрели свободу воли и вышли из-под подчинения человеку? |  |
.

вторник, 6 ноября 2012 г.
Алгоритмы: черно-белое движение. Часть VII
| В прошлых двух заметках (1, 2) было указано, что коэффициент пропорциональности линейного регулятора при движении вдоль черной линии зависит от минимального и максимального значений, которые показывает датчик освещенности на данном конкретном поле. |
Рассмотрим, что происходит с вращением оси мотора в случае работы следующей программы:

понедельник, 5 ноября 2012 г.
Регламент декабрьских робототехнических состязаний
| Как уже объявлялось ранее 22 декабря 2012 в Нижегородском Институте Информационных Технологий пройдет робототехническое состязание "МиР: Мы и Роботы - 2012". |  |
Кружок по робототехнике. Занятие четвертое
| На четвертом занятии появились два новых ученика. Ребята практически не имели представления, что такое LEGO роботы и с чего начать их программировать. Ход занятия сильно притормозился и поэтому вместо того, чтобы изучать новую тему со всей группой, пришлось потратить прилично времени на персональное объяснение материалов второго и третьего занятий. |
NXT метеостанция на дому

Но зачем покупать то, что можно сконструировать и запрограммировать самостоятельно? Наверно, подобные размышления посещали и Xander Soldaat, одного из активистов Lego сообщества. Он использовал датчик освещенности, датчик звука, барометр компании HiTechnic, и модуль NXT2WIFI. Теперь Xander смог измерять температуру, атмосферное давление, освещенность, уровень шума и передавать эти данные по wi-fi.
воскресенье, 4 ноября 2012 г.
Фестиваль RoboTech Kovrov - 2012
| 12-14 ноября г. Ковров Владимирской области будет принимать у себя гостей - впервые здесь проводиться робототехнический фестиваль RoboTech Kovrov - 2012. |
Для робототехников Нижнего Новгорода и области это мероприятие еще привлекательно тем, что до Коврова от Нижнего Новгорода всего лишь 200 км. То есть любой желающий сможет оказаться на фестивале примерно за 3 часа, причем добраться можно как автомобиле, так и на поезде. Это гораздо ближе, чем те робототехнические мероприятия, которые нам предлагается обычно!
Что же ждет тех, кто захочет поучаствовать в робототехнических состязаниях?
Робототехнические состязания 22 декабря
| Продолжая сложившуюся традицию, блог NiNoXT проведет робототехнические состязания "МиР: Мы и Роботы" в Нижегородском Институте Информационных Технологий 22 декабря 2012 года. Для участия приглашаются как команды из Нижнего Новгорода и области, так и команды из других городов. | |
Примерный вид игрового поля:

Следите за обновлениями на блоге - скоро появиться полный регламент состязаний.
суббота, 3 ноября 2012 г.
Завершился научно-технический конкурс РОСТ - 2012
| В эту субботу (3 ноября) в нижегородском доме ученых проходил очный заключительный этап Приволжского научно-технического конкурса работ школьников РОСТ - 2012. |
С Днем Рождения SmartBricks!
| Российскому производителю датчиков для LEGO Mindstorms в ноябре исполнился год со дня основания. |

Так, например, световые датчики сейчас можно приобрести за 600 рублей, а
приемник сигналов пульта дистанционного управления (вместе с пультом) всего за 900 рублей.
Заходите в их интернет-магазин и спешите сделать заказ!
Лабиринт - настольная игрушка из LEGO Mindstorms
 | Mike Brandls - давнишний участник LEGO Mindstorms движения. На его сайте можно обнаружить много нашумевших механизмов и роботов. В этот раз он решил порадовать общественность еще одним своим изобретением - настольной игрой мини-лабиринт. Цель игры - провести по лабиринту шарик, изменяя угол наклона плоскости лабиринта. |
Вот смотрите (с 1 мин 40 сек также будет показан изменения положения платформы):
Подписаться на:
Сообщения (Atom)